 1918213531@qq.com
1918213531@qq.com

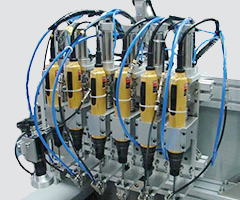
自动焊锡机器人的结构原理
1、机器人本体,一般是伺服电机驱动的轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。它的任务是精确地保证机械手末端(悍枪)所要求的位置、姿态和运动轨迹。
1、机器人本体,一般是伺服电机驱动的轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。它的任务是精确地保证机械手末端(悍枪)所要求的位置、姿态和运动轨迹。
2、机器人控制柜,它是机器人系统的神经中枢,包括计算机硬件、软件和一些专用电路,负责处理机器人工作过程中的全部信息和控制其全部动作。
3、焊接电源系统,包括焊接电源、专用焊枪等。
4、焊接传感器及系统安全保护设施。
5、焊接工装夹具。
end
上一篇
PCB电路板贴片元件自动焊锡机
















 136-1282-2594
136-1282-2594